![]()
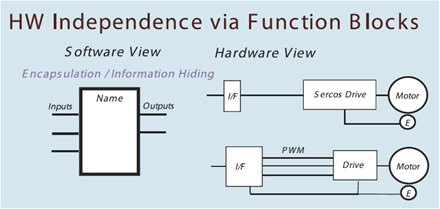
Based on application requirements and project specifications engineers are required to use or select a wide range of motion control hardware. In the past this required unique software to be created for each application even though the functions are the same. The PLCopen motion standard provides a way to have standard application libraries that are reusable for multiple hardware platforms.
This lowers development, maintenance, and support costs while eliminating confusion. In addition, engineering becomes easier, training costs decrease, and the software is reusable across platforms. Effectively, this standardization is done by defining libraries of reusable components. In this way the programming is less hardware dependent, the reusability of the application software increased, the cost involved in training and support reduced, and the application becomes scalable across different control solutions. Due to the data hiding and encapsulation, it is usable on different architectures, for instance ranging from centralized to distributed or integrated to networked control. It is not specifically designed for one application, but will serve as a basic layer for ongoing definitions in different areas. As such it is open to existing and future technologies.
Overview of the results
Currently the suite of PLCopen Motion Control Specifications consists of the following parts:
- Part 1 - Function Blocks for Motion Control
- Part 2 - Extensions (in the new release 2.0 merged with Part 1)
- Part 3 - User Guidelines
- Part 4 - Coordinated Motion
- Part 5 - Homing Procedures
- Part 6 - Fluid Power Extensions
Basically each specification contains 3 sections:
- Definition of the state machine
- Definition of a basic set of Function Blocks for single axis and multi-axes motion control
- Compliance rules and certification procedure
The publication of the specification and the first implementations clearly showed that the multi-axes implementation certainly fits within the framework as defined by the IEC 61131-3 standard.
With many implementations becoming available, motion control will never be the same: more hardware independence gives the users less training costs, and the possibility to create application software that is usable on a number of different targets more easily, and targets which can be selected in a later phase of the overall machine development cycle. This brings a higher efficiency and reduces costs during development, maintenance and training.
Certification
The rules for compliance and certification are in fact a self-certifcation. The results are reviewed by PLCopen before certification is granted and published on this website. Certified companies (PLCopen members only) are allowed to use the PLCopen Motion Control logo.
Read more on PLCopen Motion Control
Read more on the combination of Logic, Motion & Safety